After achieving touchdown on a comet for the first time in history, scientists and engineers are busy analysing this new world and the nature of the landing.
Touchdown was confirmed at ESA’s Space Operations Centre in Darmstadt, Germany at 16:03 GMT/17:03 CET on 12 November.
Since then, scientists, flight dynamics specialists and engineers from ESA, the Lander Control Centre in Cologne, Germany, and the Philae Science, Operations and Navigation Centre in Toulouse, France have been studying the first data returned from the lander.
These revealed the astonishing conclusion that the lander did not just touch down on Comet 67P/Churyumov–Gerasimenko once, but three times.
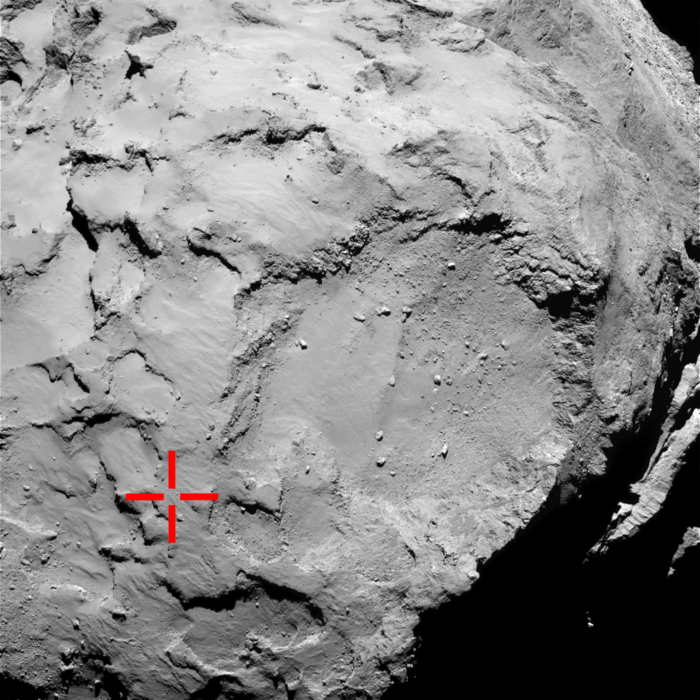
This image from Rosetta’s OSIRIS narrow-angle camera is marked to show the location of the first touchdown point of the Philae lander. It is thought that Philae bounced twice before settling on the surface of Comet 67P/Churyumov-Gerasimenko. The OSIRIS image was taken from a distance of 50 km on 2 September 2014, prior to landing. Image credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The harpoons did not fire and Philae appeared to be rotating after the first touchdown, which indicated that it had lifted from the surface again.
Stephan Ulamec, Philae manager at the DLR German Aerospace Center, reported that it touched the surface at 15:34, 17:25 and 17:32 GMT (comet time – it takes over 28 minutes for the signal to reach Earth, via Rosetta). The information was provided by several of the scientific instruments, including the ROMAP magnetic field analyser, the MUPUS thermal mapper, and the sensors in the landing gear that were pushed in on the first impact.
The first touchdown was inside the predicted landing ellipse, confirmed using the lander’s downwards-looking ROLIS descent camera in combination with the orbiter’s OSIRIS images to match features.

Rosetta’s lander Philae has returned the first panoramic image from the surface of a comet. The view, unprocessed, as it has been captured by the CIVA-P imaging system, shows a 360º view around the point of final touchdown. The three feet of Philae’s landing gear can be seen in some of the frames. Confirmation of Philae’s touchdown on the surface of Comet 67P/Churyumov–Gerasimenko arrived on Earth at 16:03 GMT/17:03 CET on 12 November. Image credit: ESA/Rosetta/Philae/CIVA
But then the lander lifted from the surface again – for 1 hour 50 minutes. During that time, it travelled about 1 km at a speed of 38 cm/s. It then made a smaller second hop, travelling at about 3 cm/s, and landing in its final resting place seven minutes later.
The touchdown signal generated on first touchdown induced the instruments to ‘think’ that Philae had landed, triggering the next sequence of experiments. Now those data are being used to interpret the bounces.
Preliminary data from the CONSERT experiment suggest that Philae could have travelled closer to the large depression known as Site B, perhaps sitting on its rim. High-resolution orbiter images, some of which are still stored on Rosetta, have yet to confirm the location.
The lander remains unanchored to the surface at an as yet undetermined orientation. The science instruments are running and are delivering images and data, helping the team to learn more about the final landing site.

Rosetta will deploy the Philae lander to the surface of comet 67P/Churyumov-Gerasimenko for in situ analysis with its 10 instruments (image credit: ESA/ATG medialab):
APXS: Alpha Proton X-ray Spectrometer (studying the chemical composition of the landing site and its potential alteration during the comet’s approach to the Sun)
CIVA: Comet Nucleus Infrared and Visible Analyser (six cameras to take panoramic pictures of the comet surface)
CONSERT: COmet Nucleus Sounding Experiment by Radiowave Transmission (studying the internal structure of the comet nucleus with Rosetta orbiter)
COSAC: The COmetary SAmpling and Composition experiment (detecting and identifying complex organic molecules)
PTOLEMY: Using MODULUS protocol (Methods Of Determining and Understanding Light elements from Unequivocal Stable isotope compositions) to understand the geochemistry of light elements, such as hydrogen, carbon, nitrogen and oxygen.
MUPUS: MUlti-PUrpose Sensors for Surface and Sub-Surface Science (studying the properties of the comet surface and immediate sub-surface)
ROLIS: Rosetta Lander Imaging System (providing the first close-up images of the landing site)
ROMAP: Rosetta Lander Magnetometer and Plasma Monitor (studying the magnetic field and plasma environment of the comet)
SD2: Sampling, drilling and distribution subsystem (drilling up to 23 cm depth and delivering material to onboard instruments for analysis)
SESAME: Surface Electric Sounding and Acoustic Monitoring Experiment (probing the mechanical and electrical parameters of the comet)
The descent camera revealed that the surface is covered by dust and debris ranging from millimetre to metre sizes. Meanwhile, Philae’s CIVA camera returned a panoramic image that on first impressions suggests the lander is close to a rocky wall, and perhaps has one of its three feet in open space.
After discussions as to whether to activate those science instruments that may cause the position of Philae to shift, MUPUS and APXS have both been deployed.
The primary battery enabling the core science goals of the lander may run out some time in the next 24 hours. As for the secondary battery, charged by solar panels on Philae, with only 1.5 hours of sunlight available to the lander each day, there is an impact on the energy budget to conduct science for a longer period of time. The original landing site offered nearly seven hours of illumination per 12.4 hour comet day.
The next update will be made during a Google Hangout at 13:00 GMT/14:00 CET. Watch online.
Have something to add to this story? Share it in the comments.
Filed under: Comets